See detailed description of PPRK robot.
My M.Sc. student, Pawel Gajda, developed under my supervision an environment for evolving vision-based controllers for simple PPRK robot.
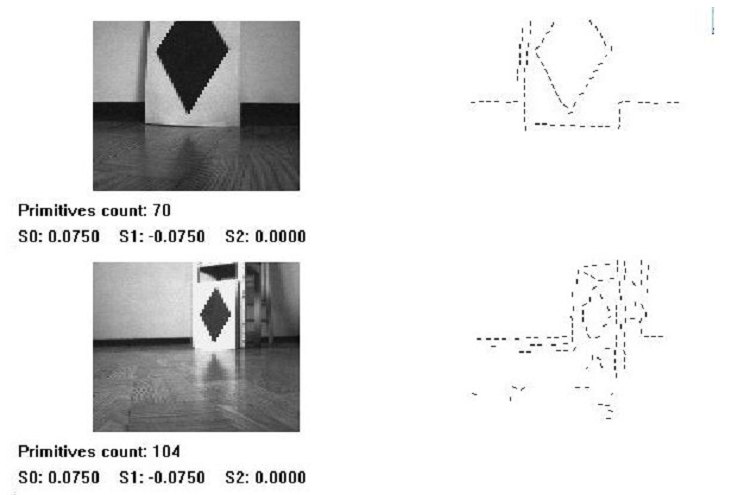
Two frames from the training video sequence and their representation in terms
of visual primitives:
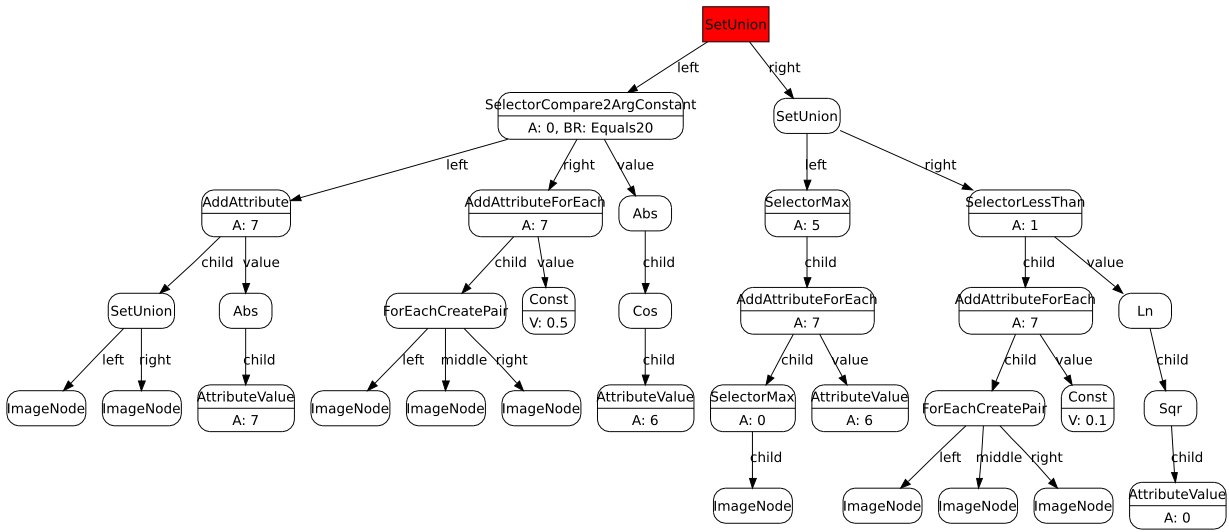
A typical individual evolved using the approach:
See the movie showing the robot navigating towards the target (WMV format).
The complete text of Pawel Gajda's thesis describing the system (in Polish).